Voraussetzung: mBot
Mit einem Zusatzspaket kann der mBot in einen Lichtfolge-Roboter verwandelt werden.
Da ich dieses Zusatzpaket (noch) nicht besitze, habe ich eine einfachere Variante erstellt:
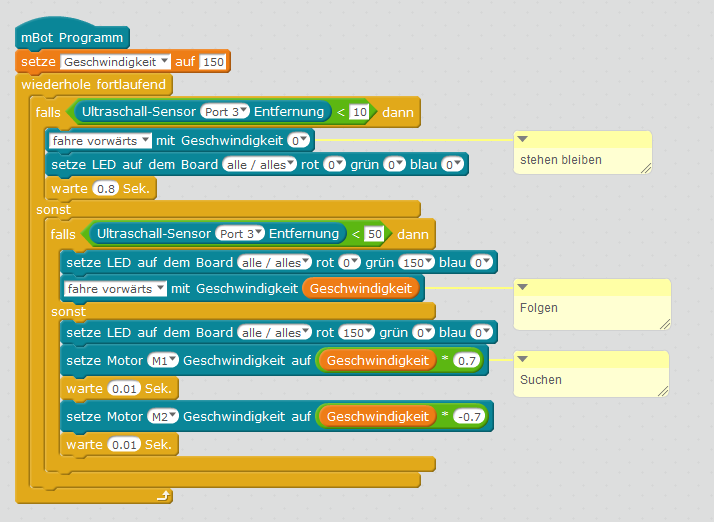
Der mBot dreht sich im Kreis, bis er einen nahe entfernten Gegenstand, z.B. eine Hand erkennt. Dann fährt er auf diesen Gegenstand zu. Kurz bevor er ihn erreicht hat, stoppt er. Entfernt sich der Gegenstand von ihm, bleibt dabei aber in dem Bereich, den der Entfernungssensor erkennt, fährt er wieder vorwärts auf ihn zu. Bewegt sich der Gegenstand in langsamer Geschwindigkeit von ihm weg, folgt er ihm.
Hier das YouTube-Video: https://youtu.be/6L25NbqV2bs
Und hier das Programm zum Download: Suche_Hand.sb2 (76.1 KB)